AMSclub Bulletins Beiträge
Zwei Radfahrer auf Verfolgungsjagd oder Radfahrer mit mechansch selbstgesteuerten Geschwindigkeit
aus Bulletin 33
von Dr. Ing. Bruno Rismondo (Milano), Mitglied des G.A.M.M.
aus dem Italienischen übersetzt von Tobias F. Haffter, Redaktor Bulletin
1. EINLEITUNG
Der nachstehende Artikel von Bruno Rismondo befasst sich mit einem eindrücklichen Modell, das er anlässlich der Ausstellung des G.A.M.M. in Novegro 1993 erstmals dem Publikum vorgeführt hat, nämlich dem Modell zweier sich abwechselnd verfolgender Radfahrer. Der vorliegende Artikel will nicht eine ausführliche Bauanleitung geben, sondern vielmehr die Grundideen der Konzeption und der Funktion des Modells sowie Vorschläge für seine rein mechanische Realisierung. In einem zweiten, späteren Beitrag sollen dann ausführlichere Bauanleitungen folgen.
Die Haupteigenschaft des Modells besteht darin, dass sich zwei voll gelenkig ausgebildete Radfahrer abwechselnd verfolgen. Jeder Radfahrer tritt auf seinem eigenen Fahrrad längs eines Kreises von einem Meter Durchmesser in die Pedale, und zwar mit unter schiedlichen, automatisch von den Radfahrern selbst gewählten Geschwindigkeiten.
Der besondere Mechanismus, der die beiden Radrennfahrer antreibt, ist ein Getriebe, das unterschiedliche Geschwindigkeiten auf die beiden im Lauf befindlichen Radfahrer derart überträgt, dass abwechselnd jeder vom nachfolgenden eingeholt wird. Wenn der schnellere Radfahrer den langsameren eingeholt hat, erfolgt automatisch ein Wechsel der Geschwindigkeiten, um die Rollen der beiden Radfahrer zu tauschen und damit einen amüsanten und unterhaltenden Effekt zu erzielen. Der Geschwindigkeitswechsel der beiden Radfahrer setzt sich abwechselnd und kontinuierlich fort, d.h. ohne Unterbrechung der Fortbewegung der beiden Radfahrer.
Die nachfolgenden Ausführungen von Bruno Rismondo werden durch zahlreiche Zeichnungen sowie drei photographische Abbildungen illustriert, die wir mit freundlicher Genehmigung von Rolando Piazzoli (Sekretär des G.A.M.M.) und Alberto Campiglio (Redaktor des Bollettino G.A.M.M.) der erschienenen Bollettino – Nr. 6 entnommen haben. Unser Kollege Hans Rudolf Stadtmann war in vorbildlicher Weise um professionelle Reproduktionen der photographischen Abbildungen des Bollettino besorgt.
2. VERSCHIEDENE FAHRGESCHWINDIGKEITEN
Es sei v1 die Geschwindigkeit des einen Radfahrers „A“ und v2 diejenige des andern Radfahrers „B“. Beim Start sei v2 > v1, so dass der Radfahrer „B“ den Radfahrer „A“ verfolgt bzw. aufholt. Wenig bevor der Radfahrer „B“ den Radfahrer „A“ erreicht, muss eine Verringerung der Geschwindigkeit v1 und eine Vergrösserung der Geschwindigkeit v1 eintreten, damit nun der Radfahrer „A“ den Radfahrer „B“ verfolgen kann. Bezeichnen wir mit v3 und v4 die beiden neuen Geschwindigkeiten. Da der Radfahrer „A“ nun den Radfahrer „B“ verfolgt, ist notwendigerweise v3 > v1; v4 < v1 und v4 < v3. Wenn sich der Radfahrer „A“ an den Radfahrer „B“ anreiht, muss die Situation umgekehrt werden, damit „A“ nicht an „B“ anstösst. „B“ beginnt nun, „A“ zu verfolgen usw. in abwechselnder Folge.
Bezeichnen wir mit v3 und v4 die beiden neu en Geschwindigkeiten. Da der Radfahrer „A“ nun den Radfahrer „B“ verfolgt, ist notwendigerweise v3 > v1; v4 < v1 und v4 < v3. Wenn sich der Radfahrer „A“ an den Radfahrer „B“ anreiht, muss die Situation umgekehrt wer den, damit „A“ nicht an „B“ anstösst. „B“ beginnt n un, „A“ zu verfolgen usw. in abwechselnder Folge.
Wir können die oben erwähnten vier Bedingungen mit Hilfe von Vektoren darstellen, wie dies aus dem Diagramm 1 zu ersehen ist.
In diesem Punkt kann man sehen, wie das Problem vereinfacht werden kann, indem man nur drei statt vier Geschwindigkeiten in Betracht zieht. Wir können in der Tat setzen v1 = v3 = v0 mit v2 > v0 und v4 < v0, derart, dass wir einen ersten Radfahrer mit der konstanten Geschwindigkeit v0 und einen zweiten Radfahrer mit veränderlicher Geschwindigkeit haben, die einmal v2 und ein anderes Mal v4 beträgt. Es ergibt sich also das nebenstehendem geänderte Diagramm 2.
Indem man also die Geschwindigkeit eines einzigen Radfahrers von v2 zu v4 und von v4 zu v2 wechselt, den anderen Radfahrer aber immer mit der gleichen Geschwindigkeit v0 bewegt, wird man die vorgeschlagene abwechselnde Verfolgung der beiden Radfahrer erhalten.
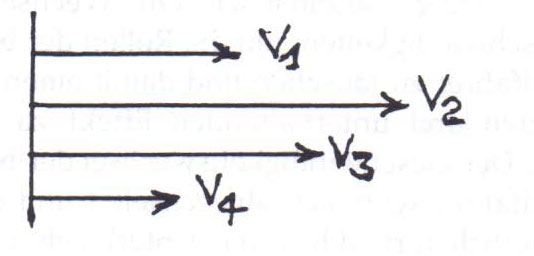
Diagramm 1
Vektoren Geschwindigkeit
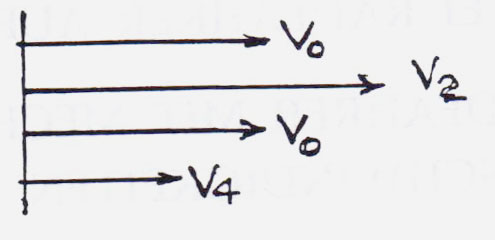
Diagramm 2
korrigierte Vektoren bei konstanter Geschwindigkeit von Fahrer 1
3. DER WECHSEL DER FAHRGESCHWINDIGKEITEN
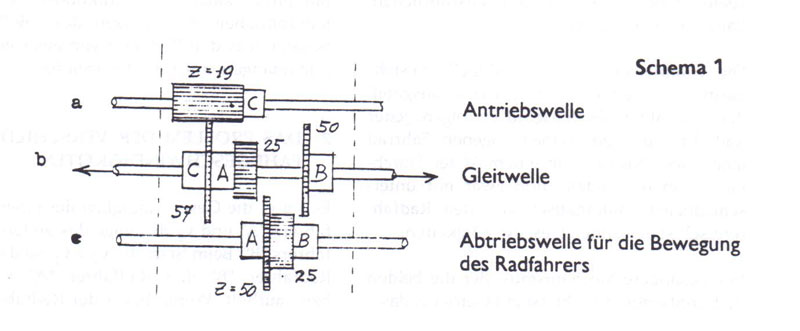
Bevor wir die passendsten Verhältnisse betrachten, die wir für die Geschwindigkeiten v2 / v4 im Hinblick auf die konstante Geschwindigkeit v0 vorzusehen haben, ist es nützlich, ein generelles mechanisches Schaltgetriebe mit zwei Stufen zu überprüfen. Nehmen wir beispielsweise ein Schaltgetriebe, das entsprechend dem Schema 1 aufgebaut ist.
Die Gleitwelle, die von einem Paar ständig in Eingriff stehender Zahnräder in Drehbewegung gehalten wird, bewirkt in der Stellung nach rechts eine Uebersetzung von ½ und in der Stellung nach links eine solche von 2. Die Welle, welche die Radfahrer antreibt, kann deshalb mit Hilfe einer geeigneten Steuerung mit der halben oder der doppelten Geschwindigkeit verglichen mit derjenigen der Gleitwelle drehen, und zwar in Abhängigkeit von der rechten bzw. linken Lage eines im Schema 1 nicht dargestellten Schalthebels. Ein aufgrund dieses Prinzips konstruiertes Schaltgetriebe bewirkt, dass sich die Radfahrer mit zwei verschiedenen Geschwindigkeiten bewegen, vorausgesetzt, dass sich die Gleitwelle in demjenigen Zeitpunkt verstellen lässt, in welchem der schnellere Radfahrer den langsameren eingeholt hat.
Das Problem der vertauschbaren Geschwindigkeiten wird in der Praxis mit einem Schaltgetriebe gemäss dem Schema 1 gelöst, wobei jedoch Varianten möglich sind, weil das gute Funktionieren der Fahrräder (Wider stand in den Gelenken der Radfahrer / Schleppen der drehbaren Ausleger für die Radfahrer / Reibung in den Führungsrollen und in allen Gelenken der beweglichen Teile des Modells) es nötig macht, geeignete Reduktionsgetriebe einzuführen, die im einzelnen in der späteren Bauanleitung behandelt werden.
Die feste Geschwindigkeit v0, die vom gleichmässig in Bewegung befindlichen Radfahrer anzunehmen ist, muss notwendigerweise zwischen die Geschwindigkeiten v2 und v4 fallen.
Bei dem entworfenen Schaltgetriebe gemäss Schema 1 erhält man beim Uebergang von der Uebersetzung ½ zur Uebersetzung 2 eine Geschwindigkeit ½, die viermal grösser ist als die Geschwindigkeit v4, was viel zu hoch für ein gutes Funktionieren der Gelenke des Radfahrers ist. Die Praxis hat gezeigt, dass es genügt, eine einfache Verdoppelung der niedrigeren Geschwindigkeit v4 einzuhalten.
4. DIE AUfOMATISCHE STEUERUNG DES SCHALTGETRIEBES
Um die GleitwelIe des Schaltgetriebes nach links oder rechts zu verschieben, ist eine Schubkraft erforderlich, welche zuerst in der einen und dann in der anderen Richtung wirkt. Wir haben schon erwähnt, dass dies erfolgen muss, wenn der schnellere Radfahrer im Begriff ist, den langsameren einzuholen.
Es muss indessen der schnellere Radfahrer sein, der die Aenderung seiner Gangart umstellt … wir werden sofort sehen, auf welche Weise. Der schnellere Radfahrer, der zum langsameren aufrückt und der sich auf der gleichen Kreislinie bewegt (die Dreharme beider Radfahrer haben den gleichen Radius) kommt in einem bestimmten Moment mit dem langsameren Radfahrer in Berührung, und zwar erfährt er einen Stoss, worauf er die Fahrt zusammen mit dem langsameren Radfahrer fortsetzt. Hierbei bremst der langsamere Radfahrer die Geschwindigkeit des schnelleren ab, während der schnellere Radfahrer den langsameren schiebt.
Der schnellere Radfahrer besitzt offensicht lich eine grössere kinetische Energie als der langsamere, was zur Ausübung einer Kraft ausgenützt werden kann, die an einem Getriebeschalthebel angelegt wird. Der eine Bremskraft ausübende, langsamere Radfahrer kann analog dazu dienen, die Schubpunkte des gleichen Schalthebels zu vertauschen. Mit anderen Worten wird mit Hilfe eines zweiten Hebels, eines Gegenschubhebels, das Schaltgetriebe die Geschwindigkeiten wechseln und den beweglichen Hebel in die erste Stellung, die Stellung beim Start, bringen.
Der bewegliche Schalthebel, welcher den Schub des schnelleren Radfahrers mit der höheren kinetischen Energie aufnimmt, muss sich tangential zur Kreisbahn der Fahrbewegung verschieben. Der feste Hebel zur Schubumkehr, der vom Radfahrer mit der konstanten Geschwindigkeit betätigt wird, drückt den beweglichen Hebel in die Ausgangsstellung, sooft die beiden Radfahrer sich erneut eingeholt haben.
Die Selbststeuerung in den beiden Richtungen ist demnach umkehrbar und automatisch. Wir werden später die mechanische Realisierung dieser beiden Schubhebel sehen.
Schema 1
Antrieb
5. DAS SCHALTGETRIEBE MIT ZWEI GESCHWINDIGKEITEN
Wie bereits im Paragraph 3. erwähnt, ist die praktisch zu bestimmende Geschwindigkeit v2 das Doppelte der langsameren Geschwindigkeit v4. Die resultierenden Uebersetzungen sind folglich 1:1 für die Geschwindigkeit v2 und 1:2 für die Geschwindigkeit v4.
Statt eine Gleitwelle mit den auf ihr befestigten Zahnrädern zu verschieben, verbessert sich der Betrieb, wenn man die Welle festmacht und die Zahnräder auf ihr gleiten lässt. Das Schema 2 zeigt die entsprechende Anordnung: Zwei frei auf der Welle drehbare Ritzel sind durch eine ebenfalls frei drehbar angeordnete doppelte Kupplungshülse Nr. 171 miteinander verbunden.
Gemäss dem Schema 3 sind die drei Wellen a, b und c des Schaltgetriebes in zueinander senkrechten Ebenen angeordnet, und zwar
- die Welle b auf der Schnittgeraden der Ebenen (ab) und (bc)
- die Welle a auf der Horizontalebene in zwei Lochdistanzen von der Welle b
- die Welle c auf der Vertikalebene in zwei Lochdistanzen von der Welle b.
Das Gehäuse, in welchem das Schaltgetriebe untergebracht ist, wird in der späteren Bauanleitung vollständig beschrieben sein. Im Schema 3 sind die Lagen der genannten Wellen wiedergegeben. Auf diese Weise benötigt das Schaltgetriebe nur wenig Raum.
- Die Welle b befindet sich in günstiger Lage für die Umschaltung, und die untere Welle c hat die gleiche Höhe wie die Verbindungs welle zum Antriebsrad des Fahrrads.
- Die Antriebswelle a, die gegenüber dem zentralen Loch der Trägerplatte verschoben ist, von welcher zentralen Position aus die primäre Antriebswelle arbeitet, wird mit der letzteren über eine Gruppe von Vorgelegeritzeln angetrieben, vgl. die spätere Bauanleitung.
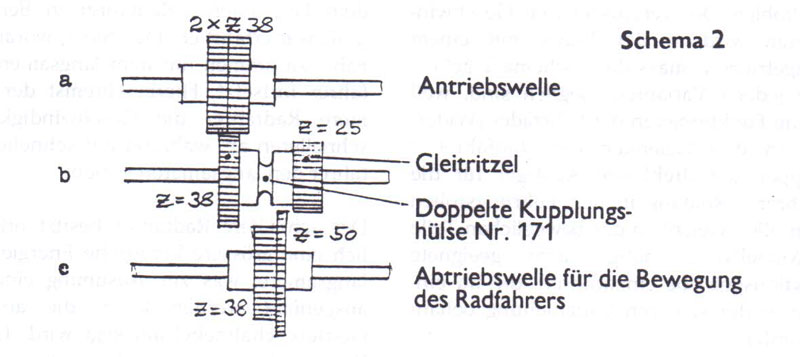
Schema 2
Antrieb mit frei drehbaren Ritzeln
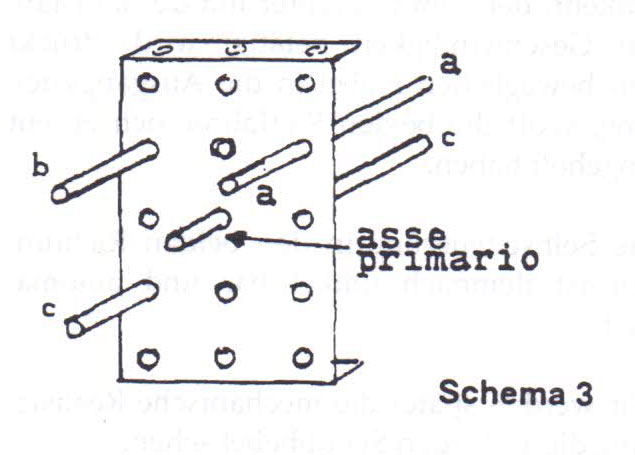
Schema 3
Lage der Wellen
6. DAS STEUERSYSTEM FÜR DAS GETRIEBE IM FAHRBETRIEB
Die speziellen Hebel, welche den Wechsel der Geschwindigkeiten des einen der beiden Radfahrer steuern, sind aus Kreisbögen, nämlich gebogenen Flachbändern mit 11 Löchern, gebildet, wie dies aus Fig. 1 ersichtlich ist. Der äussere Teil des Arms, auf dem die Umschaltvorrichtung untergebracht ist, trägt einen Winkel mit Nabe (1) Nr. 128, der auf der einen Seite mit einem 5 Loch – Flachband soowie einem kleinen Knotenblech Nr. 133a und auf der anderen Seite mit einem 4 Loch – Flachband verschraubt ist. In den Drehpunkten (2) und (3) sind 11 Loch – Flachbänder angelenkt, die in den Schiebeösen von Stellnaben (5, 6) Nr. 50 laufen, welche ihrerseits auf Drehbolzen im letzten Loch der gebogenen 11 Loch – Flachbänder montiert sind. Die genannten Flachbänder realisieren die bereits erwähnten Schubhebel und sind an ihren Enden mit einem Winkelstück Nr. 12 versehen. Es ist nützlich, nochmals anzuführen, dass das Gleiten der Schubhebel tangential zum Bewegungskreis der Radfahrer geschieht (Richtung der Geschwindigkeit im Berührungspunkt). Der Steuerhebel für das Schaltgetriebe wirkt jedoch in der Querrichtung und parallel zu den Wellen des Getriebes.
Im Drehpunkt (4) ist ein 13 Loch – Flachband angelenkt, das ebenfalls in der Schiebeöse einer Stellnabe (7) Nr. 50 läuft, die auf einem Drehbolzen positioniert ist, der im letzten Loch eines 3 Loch – Flachbandes frei drehbar ist, wie dies aus Fig. 1 ersichtlich ist.
Die gebogenen 11 Loch – Flachbänder sind mit drei überlappenden Löchern auf der Unterseite einer abgebogenen Platte mit 3 x 5 Löchern verschraubt, siehe Fig. 1. Das 13 Loch – Flachband betätigt mittels eines im sechsten Loch vom Drehpunkt aus auf dem Flachband befestigten Gewindestifts die dop pelte Kupplungshülse Nr. 171 (siehe Schema 2) mit den beweglichen Zahnrädern des Schaltgetriebes.
Wie bereits erwähnt, sind auf den freien Enden der in den Schiebeösen der Stellnaben (5, 6) laufenden 11 Loch – Flachbänder Win kelstücke aufgeschraubt , welche die Schub flächen der jeweiligen Schubhebel bilden. Das tangentiale Gleiten der Schubhebel, erst in der einen Richtung und dann in der entge gengesetzten Richtung, wandelt sich in eine abwechselnde Querverschiebung des radialen Hebels bzw. dessen Steuerstift um.
Auf dem Ausleger, welcher die Bewegung auf den zweiten Radfahrer überträgt, ist ein zweiter Kreisbogen mit den gleichen Abmessungen wie diejenigen des vorgängig beschriebenen Kreisbogens festgeschraubt, Fig. 2. An den Enden der bei den gebogenen 11 Loch – Flachbänder sind abgewinkelte Lagerplatten P3 und P4 befestigt, welche die den endseitigen Winkelstükken der beschriebenen Gleithebel gegen überstehenden Schubpunkte bilden.
Arbeitsweise des Aufbaus
Es sei angenommen, dass zu Beginn der Radfahrer „B“ sich schneller bewegt als der Radfahrer „A“, siehe Fig. 3, so dass „B“ den letzteren einholt, bis der Schubpunkt P2′ auf den Schubpunkt P4 stösst (Stellung der Schalthebel , wenn „B“ schneller als „A“ ist) . Dies schiebt den Schubpunkt P2′ in die Lage P2 bzw. gleichzeitig den Schubpunkt P1 in die Lage P2′.
Gleichzeitig mit diesem Lagenwechsel von P1 und P2′ erfolgt die Verschiebung des Schaltgetriebes, so dass der Radfahrer „B“ sich nun mit der Geschwindigkeit v4 fortbewegt und der Radfahrer „A“ mit der Geschwindigkeit v0 gegenüber dem ersteren schneller fährt und ihn einholen kann. Wenn „B“ die Geschwindigkeit v4 statt der Geschwindigkeit v2 angenommen hat, wobei v4 < v0, nähert er sich „A“, bis der Schubpunkt P3 auf den Schubpunkt P1′ stösst und diesen in die Lage P1 sowie den Schubpunkt P2 in die Lage P2′ drückt. Tatsächlich wird der in der Lage P1 befindliche Schalthebel des Radfahrers „B“ durch den festen Hebel des Radfahrers „A“ (Schubpunkt P3) in die rückwärtige Lage P1 gedrückt, wobei gleichzeitig ein Geschwindigkeitswechsel im umgekehrten Sinn vorgenommen wird. Auf diese Weise nimmt der Radfahrer „B“ erneut die Geschwindigkeit v2 > v0 an, so dass „B“ wiederum „A“ einholt usw. Die Radfahrer verfolgen sich somit abwechslungsweise, solange der Antriebsotor des Systems nicht ausgeschaltet wird.
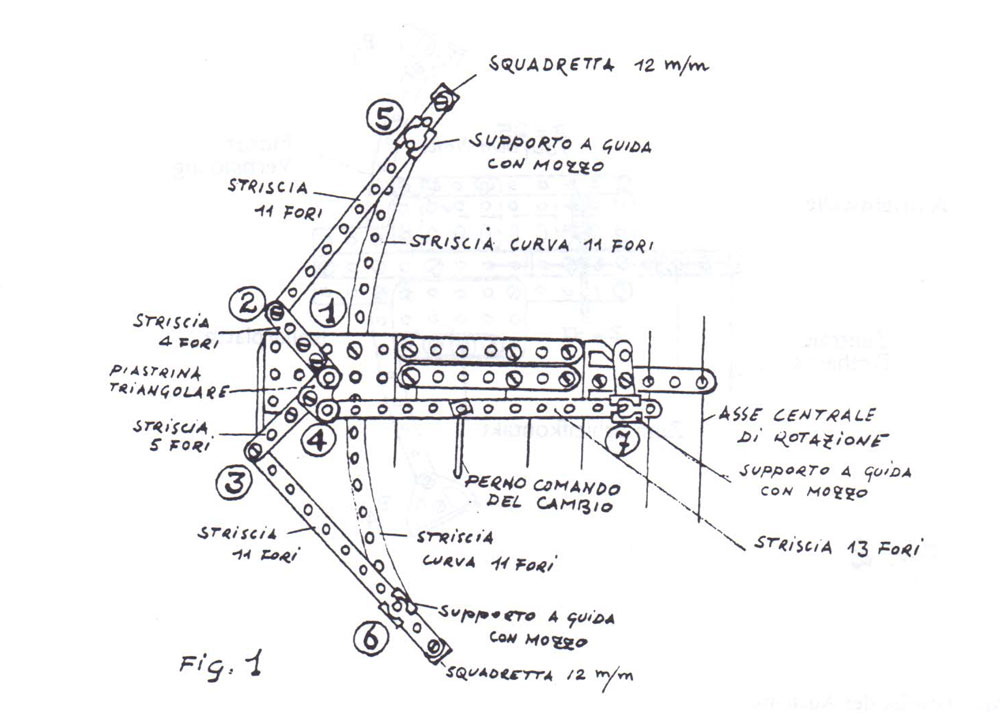
Fig. 1

Fig. 2
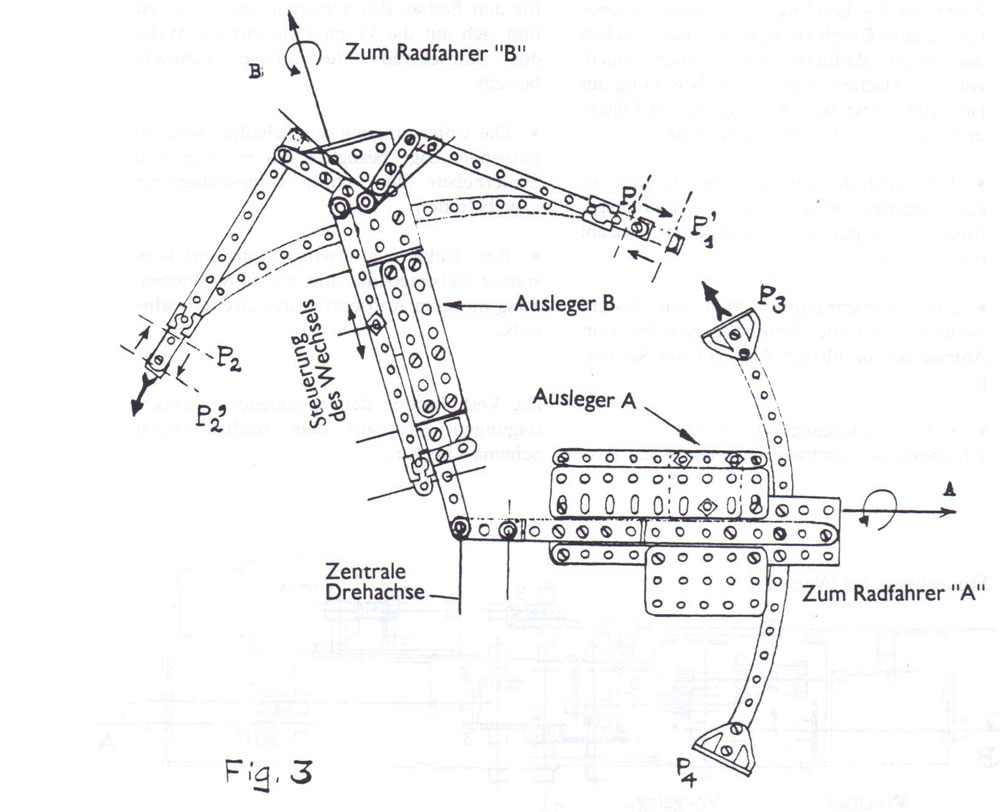
Figur 3
7. DER ANTRIEBSMEOiANISMUS
Aufgrund des beschriebenen Schaltgetriebes für die drei Geschwindigkeite n, mit welchen die beiden Radfahrer fortschreiten sollen, wird der Mechanismus für die Bewegung der Fahrräder unter Berücksichtigung der folgen den grundsätzlichen Punkte realisiert:
- Eine zentrale Antrie bswe lle, die für ein Zahnradpaare aufweisendes Reduktionsge triebe zur Anpassung an die Motordrehzahl reserviert ist.
- Zwei Uebertragungswellen mit festem Verhältnis für die Reduktionsgetriebe zum Antrieb der drehbaren Ausleger der Radfah rer.
- Ein Uebertragungssystem für die Ver schiebung der zentralen Antriebswelle, das für den Einbau des Schaltgetriebes nötig ist und sich auf die Verbindung mit der Welle des Antriebsrads des ersten Fahrrads bezieht.
- Die Unterbringung des Schaltget riebes in passender Lage bezüglich des transversalen Steuerhebels (der sich in vorgeschrie bener Lage befindet).
- Eine Uebertragungsvorrichtung mit kon stanter Uebersetzung und mit fester Ve rbin dung mit dem Antriebsrad des zweiten Fahrrads.
Die Verknüpfung der verschiedenen Ueber tragungen geht aus Schema 4 hervor.
Kurzbeschreibungdes Mechanismus
Die zentrale Welle (1) des Schemas 4, mit welcher der Elektromotor in Verbindung ste hen wird, trägt ein Ritzel (2) mit 25 Zähnen, das mit zwei Zahnrädern (3) mit je 50 Zähnen in Eingriff steht. Die Zahnräder sind bezüg lich de s Ritzels (2) gegeneinander versetzt auf zwei vertikalen Wellen angeordnet, von welchen die eine mit dem drehbaren Ausle ger des Radfahrers „A“ und die andere mit demjenigen des Radfahrers „B“ in Verbindung steht. Während des Zeitabschnitts, in wel chem ein Radfahrer zum anderen aufrückt, überdecken sich die beiden Zahnräder (3) teilweise. Die axiale Versetzung der Zahn räder erlaubt eine solche Überdeckung und vermeidet dadurch ein gegenseitiges Berühren der Zähne der beiden Zahnräder, was ihre Wellen blockieren würde.
Die Hauptwelle des Schaltgetriebes wird von einem Ritzel (4) mit 15 Zähnen angetrieben, das mit einem Kronrad (5) mit 25 Zähnen kämmt. Ein Vorgelege, bestehend aus einem Ritzel mit 19 Zähnen und einer Länge von 12 mm sowie aus zwei weiteren Ritzeln mit 19 Zähnen und Längen von 6 mm, versetzt die Hauptwelle um ein Loch nach rechts und sowie um ein Loch nach oben, vergleiche die Lagen der Wellen a, b und c im Schema 3 des Paragraphen 5. So steht der Raum für die Anordnung des Schaltgetriebes zur Verfü gung.
Entsprechend der angenommenen Lage der Zahnräder des Schaltgetriebes, die vom transversalen Hebel gesteuert werden, dreht sich die Radwelle des Radfahrers „B“ in den den folgenden Verhältnissen:
- T4 =½X 15/ 25 X½ = 15/100 = 0,15 (für die Geschwindigkeit v4)
- r2 =½X 15/ 25 X 1 = 15 / 50 = 0,30 (für die Geschwindigkeit v2)
Die Radwelle des Radfahrers „A“, die im Aus leger mit den Gegenschubhebeln (Fig. 2) gelagert ist, wird über zwei feste Zahnrad paare angetrieben. Wie aus dem Schema 4 hervorgeht, sind auf diesem Ausleger, auf welchem ebenfalls der Motor untergebracht ist, zwei Kegelräder (6) mit 26 Zähnen und zwei Ritzel (7) und (8) mit 15 bzw. 38 Zähnen angeordnet. Die Radwelle des Radfahrers „A“ (Geschwindigkeit v0) dreht deshalb im Verhältnis r0 = 15/ 38 x 25/50 x 1 = 15 / 76 = 0,19.Daraus wird ersichtlich, dass v2 > v0 > v4.
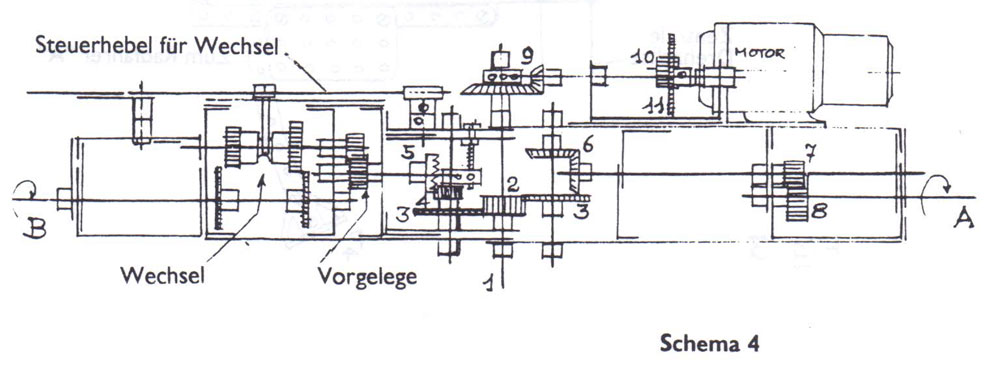
Schema 4
Verknüpfung der Übertragungen
8. DIE TATSÄCHLICHE GESCHWINDIG KEITEN DER RADFAHRER UND DER ANSCHLUSS AN DEN MOTOR
Legen wir fest, dass bei der Geschwindigkeit v2 der Radfahrer „B“ ungefähr 60 cm/s zurück legen soll. Da der Raddurchmesser einschliesslich des Gummireifens den Wert von 8,5 cm hat, legt der Radfahrer für jede Rad umdrehung einen Weg von 8,5 x 3,14 cm = 26,6 cm zurück. Um also die eingangs gemachte Festlegung von 60 cm/s zu erfül len, muss das Rad 60/26,6 = 2,25 Umdrehungen pro Sekunde oder 135 Umdrehungen pro Minute ausführen. Da die Uebersetzung für die Geschwindigkeit v2 0,30 ist, muss die zentrale Welle des Modells mit 135/0,3 = 450 Umdrehungen/min drehen.
Die Leerlaufdrehzahl des verwendeten Motors beträgt 2922 Umdrehungen pro Minute. Somit ist eine Herabsetzung seiner Drehzahl um den Faktor 2922/ 450 = 6,49 erforderlich.
Suchen wir also ein Zahnradpaar, das einen solchen Wert verwirklicht:
- mit Uebersetzungen l/3 x 1/2 1/ 6 wäre die erreichte Drehzahl zu hoch
- mit Uebersetzungen 1/3 x 1/3 1/9 wäre sie zu niedrig
Mit Uebersetzungen 1/3 x 25/57 = 25/171 vermindert sich die Motordrehzahl um den Faktor 6,8, was der oben festgelegten Bedingung von 6,49 sehr nahe kommt. Man sieht deshalb ein Kegelradpaar (9) mit 16 bzw. 48 Zähnen sowie auf der Motorwelle ein Ritzel (10) mit 25 Zähnen vor, das mit einem Zahn rad (11) mit 57 Zähnen in Eingriff steht, wie dies aus dem Schema 4 hervorgeht.
Schema 4
Verknüpfung der Übertragungen
9. ARBEITSWEISE DER IM LAUF BEFINDLICHEN RADFAHRER
Die vollständigen Uebersetzungen für die einzelnen Geschwindigkeiten werden nach den obigen Ausführungen
- für v0 …… R0 = 0,19×0,14 = 0,026
- für v2 …. .. R2 = 0,3 x 0,14 = 0,042
- für V4 …… R4 = 0,15 x 0,14 = 0,021
Der Motor mit 2922 Umdrehungen in der Minute bewirkt, dass die Räder die folgenden Drehzahlen erhalten
- v0 = 2922 x 0,026 = 75,8; 1,26 U/ s
- v 2 = 2922 x 0,042 = 122,7; 2,04 U/ s
- v4 = 2922 x 0,021 = 61,3 ; 1,02 U/ s
Da das Rad des Fahrrads pro Umdrehung 26,6 cm Weg zurücklegt, radeln die Radfahrer mit den folgenden Geschwindigkeiten
- v0 = 26,6 x 1,26 = 33,5 cm/ s
- v2 = 26,6 x 2,04 = 54,2 cm/ s
- v4 = 26,6 x 1,02 = 27,1 cm/ s
Wir legen nun den Durchmesser der Kreis bahn der beiden Radfahrer auf 82 cm fest, was aus praktischen Gründen etwas weniger als der früher erwähnte Durchmesser von einem Meter ist. Damit erhält der Fahrweg eine Länge von 257,5 cm.
Der durch die speziellen Schubhebel bewirk te Geschwindigkeitswechsel erfolgt jedoch auf 3/4 des Fahrwegs (Winkel zwischen den Hebeln = 90°), so dass die Länge des für die jeweiliegen Verfolgungen bestimmten Fahrwegs 3/ 4 x 257,5 cm = 193,1 cm beträgt. Wir bestimmen nun die zeitliche Dauer der Verfolgungen. Betrachten wir zuerst den Lauf des Radfahrers „A“ mit der Geschwindigkeit v0 = 33 ,5 cm/ s, der vom Radfahrer „B“ mit der Geschwindigkeit v2 = 54,2 cm/ s verfolgt wird. Der Unterschied der Geschwindigkeiten der beiden Radfahrer beträgt 54,2 – 33,5 = 20,7 cm/ s. lm Laufe der Zeit legen die Radfahrer also den ihren Geschwindigkeiten ent sprechenden Weg zurück, wobei der Radfahrer „B“ in jeder Sekunde den Abstand zum Radfahrer „a“ um 20,7 cm verkürzt.
Da die beiden Radfahrer anfänglich um 3/ 4 der Gesamtlänge des Fahrwegs, also um 193,1 cm voneinander distanziert sind, erreicht der Radfahrer „B“ den Radfahrer „A“ nach 193,1 / 20,7 = 9,3 s, worauf er seine Geschwindigkeit von v2 zu v4 wechselt.
Die graphische Darstellung dieser Zuständ e in der ersten Phase des Laufs ist aus dem Diagramm 3 ersichtlich.
In 9,3 Sekunden hat der Radfahrer „A“ einen Weg von 33,5 x 9,3 = 311,55 cm zurückgelegt, was 311,55 / 257,48 = 1,21 Umläufen entspricht. Der Radfahrer „A“ befindet sich also gegenüber seinem Ausgangspunkt A in guter Annäherung um 1,2 Umläufe (1 Umlauf + 1/ 5 Umlauf) verschoben im Punkt A‘. Der Radfahrer „b“ befindet sich in diesem Zeit punkt um 90• hinter dem Punkt A‘ im Punkt B‘. Von diesen Lagen aus setzen dann die Radfahrer ihren Lauf mit den Geschwindig keiten v0 = 33,5 cm/s bzw. v4 = 27 ,1 c m/s fort, wie dies im Diagramm 4 dieser zweiten Phase dargestellt ist.
Der Unterschied der beiden neuen Geschwindigkeiten ist 33,5 – 27,1 = 6,4 cm/ s. Der Radfahrer „A“ gewinnt also 6,4 cm pro Sekunde auf den Radfahrer „B“ und legt dem nach die 3/ 4 der gesamten Fahrweglänge, die ihn vom Radfahrer „B“ trennt, in 193,1 / 6,4 s = 30,1 s zurück.
In diesem Zeitpunkt schalten die Schubhebel den Radfahrer „B“ erneut auf die höhere Geschwindigkeit v2 = 54,2 cm/ s um, so dass „B“ wiederum „A“ verfolgt, usw.

Diagramm 3
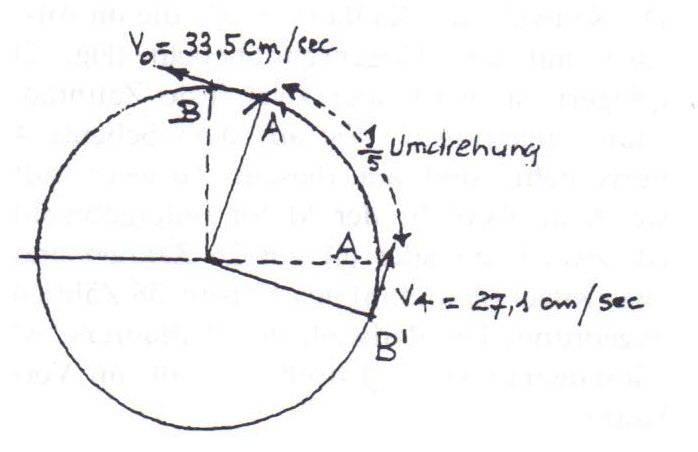
Diagramm 4
Hinweis
In später folgenden Anleitungen zum Bau des Modells werden die nachstehenden weiteren Modellteile separat beschrieben werden:
- Fahrräder mit der Bewegungsübertragung auf die Pedale;
- Radfahrer mit den Gelenkverbindungen zwischen dem Körper, den Beinen und den Armen ;
- Kreisplatte mit Ring und elektrischen Kontakten:
- Anordnung der Schubhebel zur Steuerung der Geschwindigkeitswechsel;
- Verbindungsstangen von den Radfahrern zu den drehbaren Auslegern.
Im Zusammenhang mit dem vorliegenden Beitrag und der nachfolgenden Bauanleitung verwei sen wir auf die umseitigen Bilder. Es zeigen:
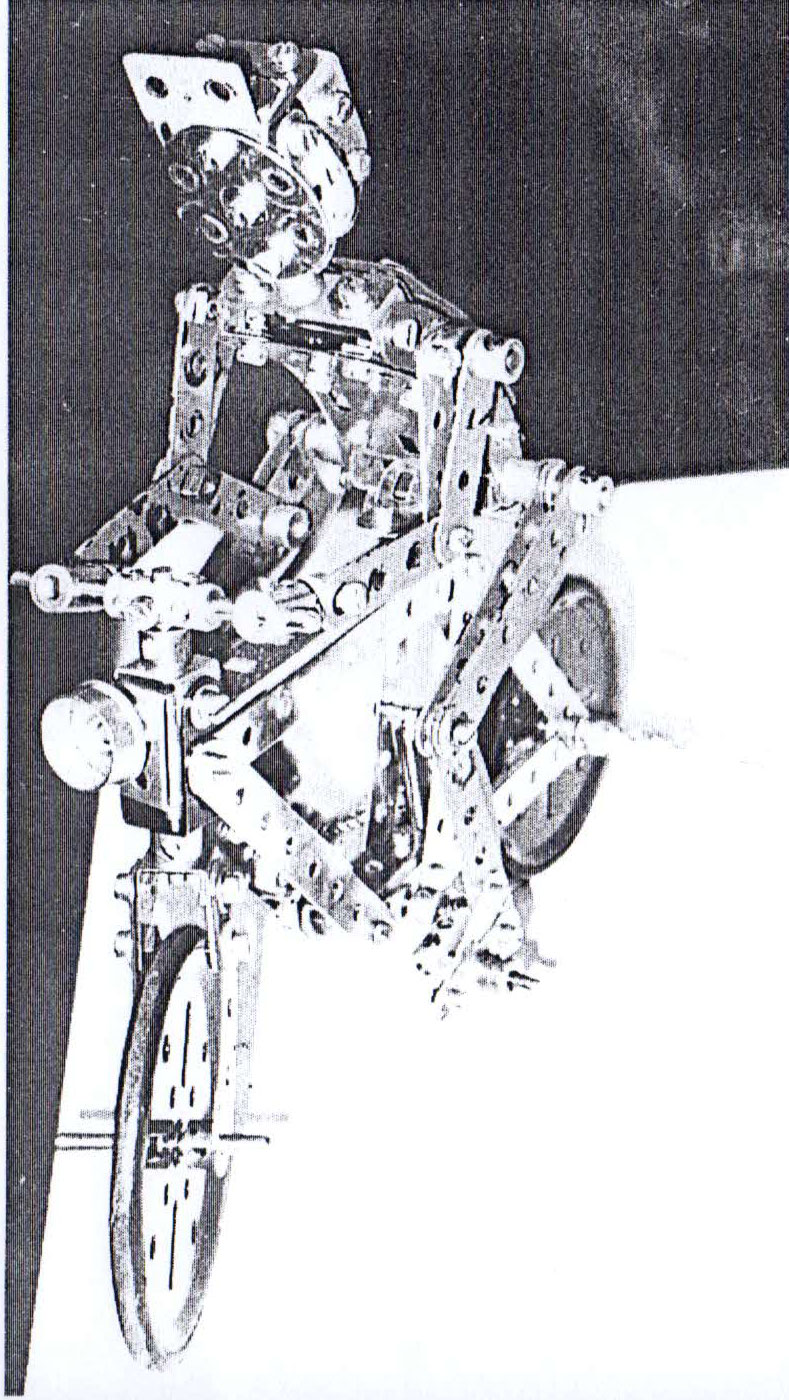
- Bild 1: Eine Gesamtansicht des Modells
- Bild 2: Eine Ansicht des Schaltgetriebes im Ausleger des einen Radfahrers und eines Teils des Antriebsmechanismus im Ausleger des anderen Radfahrers
- Bild 3: Eine Ansicht eines der beiden Radfahrer
Nachwort des Redaktors
Der Redaktor hat sich mit beträchtlichem Zeitaufwand bemüht, trotz seiner nur unzureichenden Kenntnisse der italienischen Sprache eine im Sinn unseres Fachmannes Prof. Georges Spinnler technisch korrekte sowie auch lesbare und verständliche Uebersetzung anzufertigen. Für etwaige Unstimmigkeiten bittet der Redaktor im voraus um Nachsicht.
Copyright 1994 Dr. Ing. Bruno Rismondo und AMSclub
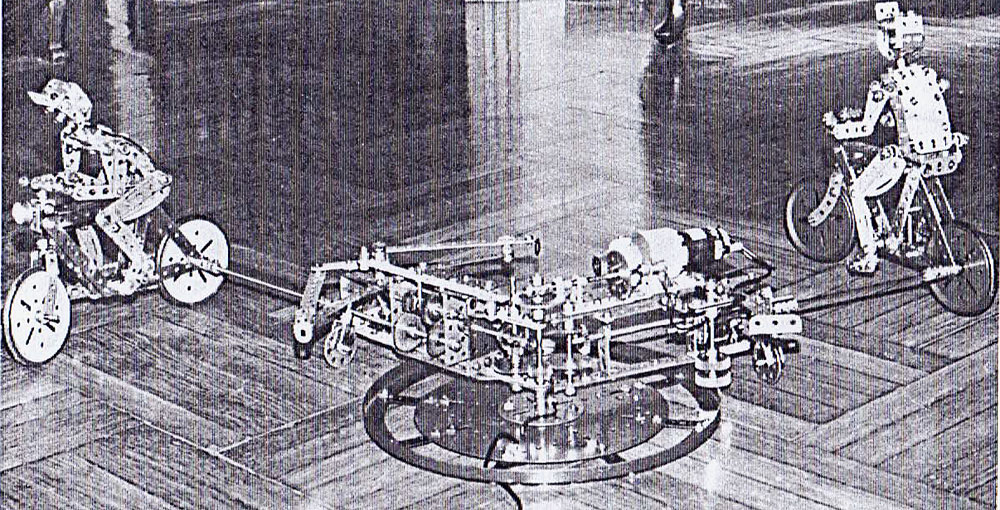
Bild 1
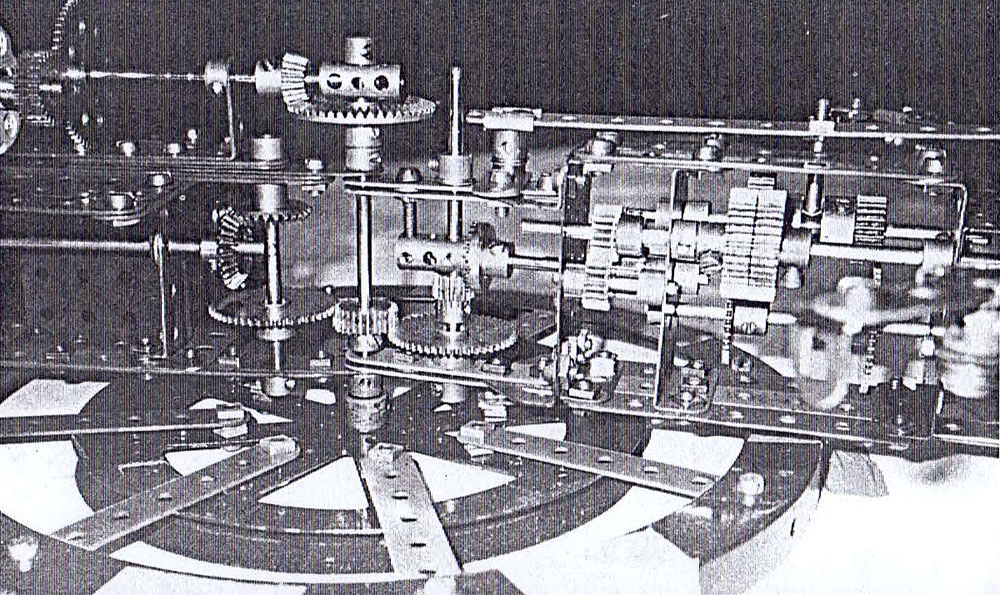
Bild 2