AMSclub Publikationen
Vierachsiger Tram-Gelenkwagen für Spur 0
(Bulletin 71/2014)
von Peter Hartmann
Das Modell (Bild 1) ist dem Triebwagentyp GT 4 nachempfunden, der 1959 von der Maschinenfabrik Esslingen an die Stuttgarter Straßenbahn geliefert wurde.
Was mir an diesem Fahrzeug sofort auffiel und was mich zum Bau des Modells bewog, war das fehlende Jakobsdrehgestell – so nennt man das unter dem Kastengelenk normalerweise befindliche Drehgestell, das beide Kastenhälften abstützt.
Das Tramnetz in Stuttgart weist stellenweise sehr enge Kurven und auch einige Steilstrecken auf, die besondere Anforderungen an die Fahrzeuge stellen. In den 50er-Jahren plante man, die zweiachsigen Motor- und Beiwagen durch modernere Fahrzeuge zu ersetzen. Gewöhnliche vierachsige Wagen würden nun aber in engen Kurven mit ihrem mittleren Teil zu weit nach innen, bei zu großem Überhang mit den Enden zu weit nach außen über das Gleis hinausragen. Da Versuchsfahrten mit sechsachsigen Fahrzeugen nicht befriedigten (vermutlich wegen der häufigen Gefällsbrüche), beauftragte man die Maschinenfabrik Esslingen mit dem Bau von vierachsigen Gelenktriebwagen.
Was für ein Mechanismus ist nun verantwortlich, dass sich die beiden Wagenkästen in der Kurve so verhalten, wie wenn das Gelenk durch ein drittes Drehgestell geführt würde, wie im Bild 2 zu sehen ist?
Georg Eiermann vom Freundeskreis Metallbaukasten hat mir Zeichnungen aus der Patentschrift gesandt, aus der der Mechanismus klar hervorgeht (Siehe Bild 3) und wofür ich Georg herzlich danken möchte.
Beschreibung des Fahrzeugs
Die beiden Wagenkästen stützen sich einerseits auf die beiden Drehgestelle (bei 16 und 17) andererseits auf die Mitte (3) des Trägers 9, der auf beiden Seiten mit den Drehgestellen gelenkig verbunden ist. Beim Stuttgarter GT4 sind die Drehpunkte relativ zum jeweiligen Drehgestell in dessen Längsachse verschiebbar, daher die Lenker 20 und 21. Bei meinem Modell sind aber die Drehzapfen der Drehgestelle 14 und 15 in Längsrichtung des Wagenkastens verschiebbar, während die beiden Drehpunkte bei 20 und 21 fest mit dem Drehgestell verbunden sind. Da nur das vordere Drehgestell (siehe Bild 4) motorisiert ist, wollte ich die beiden Drehgestelle direkt verbinden. Auf diese Weise vermeide ich den Kraftfluss über die beiden Wagenkästen. Man beachte die beiden Rollen, auf die sich der vordere Wagenkasten aufstützt. Der Antrieb erfolgt über Schnecke, Märklinzahnrad (10438) und Kettenräder auf beide Achsen
Wie schon erwähnt, ruhen die beiden Wagenkästen bei beiden Drehgestellen auf den beiden oberen kleinen Messingrollen (Siehe Bilder 3, 4, 5). Die Drehzapfen (Meccano #115a) ragen in die beiden Längsschlitze (Bild 7); somit ist das Drehgestell in der Wagenkasten-Längsrichtung verschiebbar.
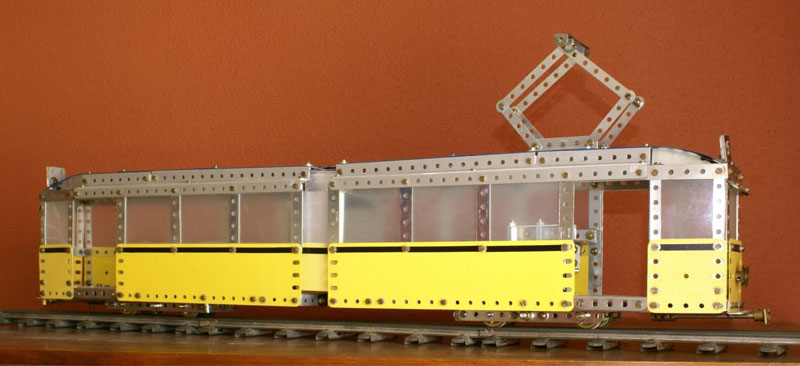
Bild 1
Modell abgeleitet vom Triebwagentyp GT 4
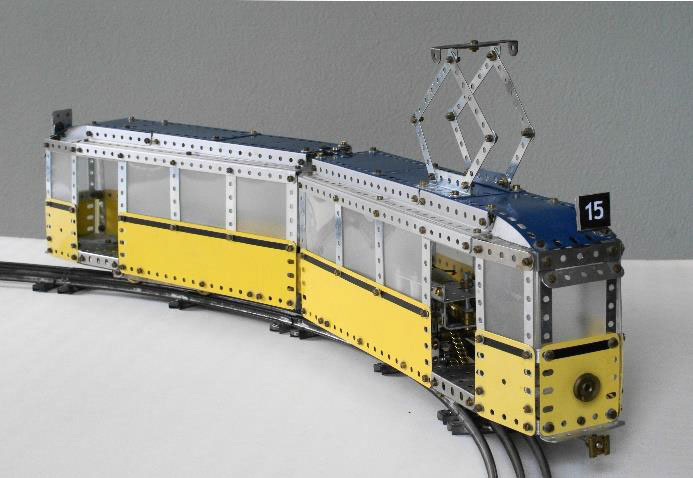
Bild 2
Gelenkwagen in der Kurve.
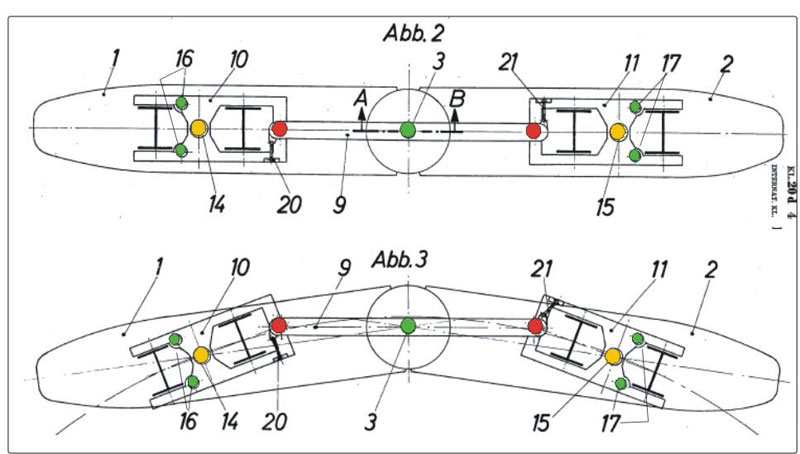
Bild 3
Gelenkmechanismus

Bild 4
vorderes, motorisiertes Drehgestell
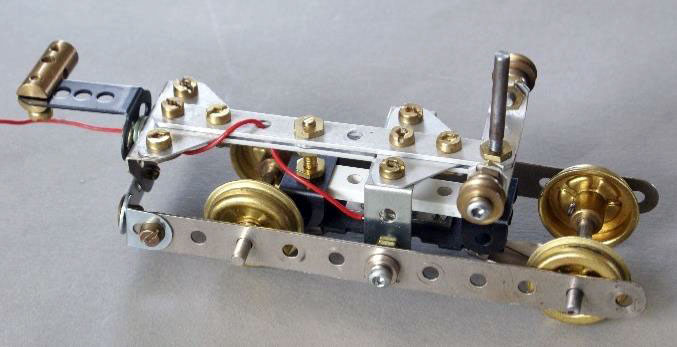
Bild 5
hinteres Drehgestell

Bild 6
Unterseite des hinteren Drehgestells
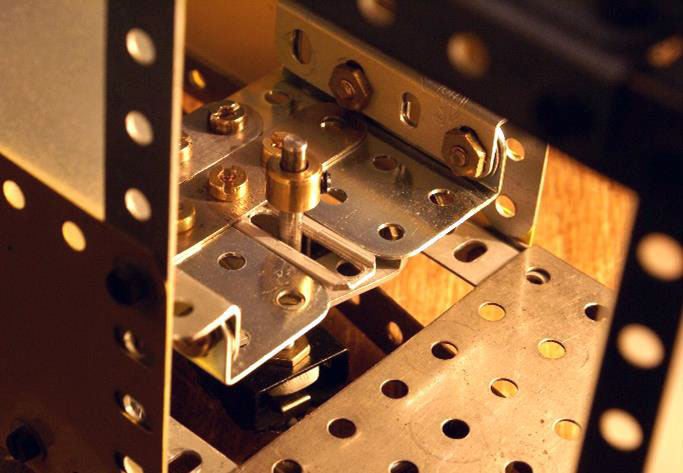
Bild 7
Drehzapfen im Längschlitz

Bild 8
Ansicht des Fahrzeugs von unten

Bild 9
Das Original: zwei Stuttgarter GT